Gute Erfahrungen mit dem iPad
Als wir 2012 mit der Roter Sand im St Lorenz Strom Richtung Quebec navigiert haben, nutzten wir eine vergleichbare Ausstattung. Im St. Lorenz gibt es Zonen im Strom, da liefen bei ablaufenden Wasser (Ebbe) 14 kn Strom gegenan und bei auflaufendem Wasser 7 kn Strom gegenan. Wir waren also mit unsrer klassischen Traditions-Ketsch immer vor Anker schneller als unter Maschine und/oder Segeln.
Die einzige Möglichkeit, überhaupt vorwärts zu kommen, war das Nutzen der Nehrströme zwischen den Felsen auf der 5-m-Linie. Jedoch die Empfehlung des Lotsen aus der Großschifffahrt lautete: „Keep a minimum distance of two miles from the rocks!“ – dann legte er sich schlafen. Ich pirschte mich unter vollen Segeln und mit AK voraus an die Felsen, kam immer wieder in die Nehrströme und schaffte dadurch bis zu 80 sm am Tag. Gelernt hatte ich diese Technik vor Jahrzehnten beim Segeln im Piraten auf dem Niederrhein gegen den Strom und um die Buhnen herum.
Um diese Kanutaktik sicher auszuführen, braucht man sehr genaue Karten und die exakte Position. Dabei war mein kleiner iPad 2 der genaueste. Auf Ihm war die 5-m-Linie klar zu erkennen und die Position entsprach genau dem, was man draußen an Gurgeln und Glucksen wahrnehmen konnte. Seit dieser Erfahrung habe ich den iPad und die dazu passende Navionics App immer dabei.
Auf dem Gerät lauft auch die Map-Software von NV Charts. Die passt gut zu den Papierkarten, die wir von NV an Bord haben und es gibt sie kostenlos beim Kauf der Papierkarten dazu. Die eingescannten Karten sind jedoch den Vektorkarten von Time Zero im täglichen Betrieb deutlich unterlegen.
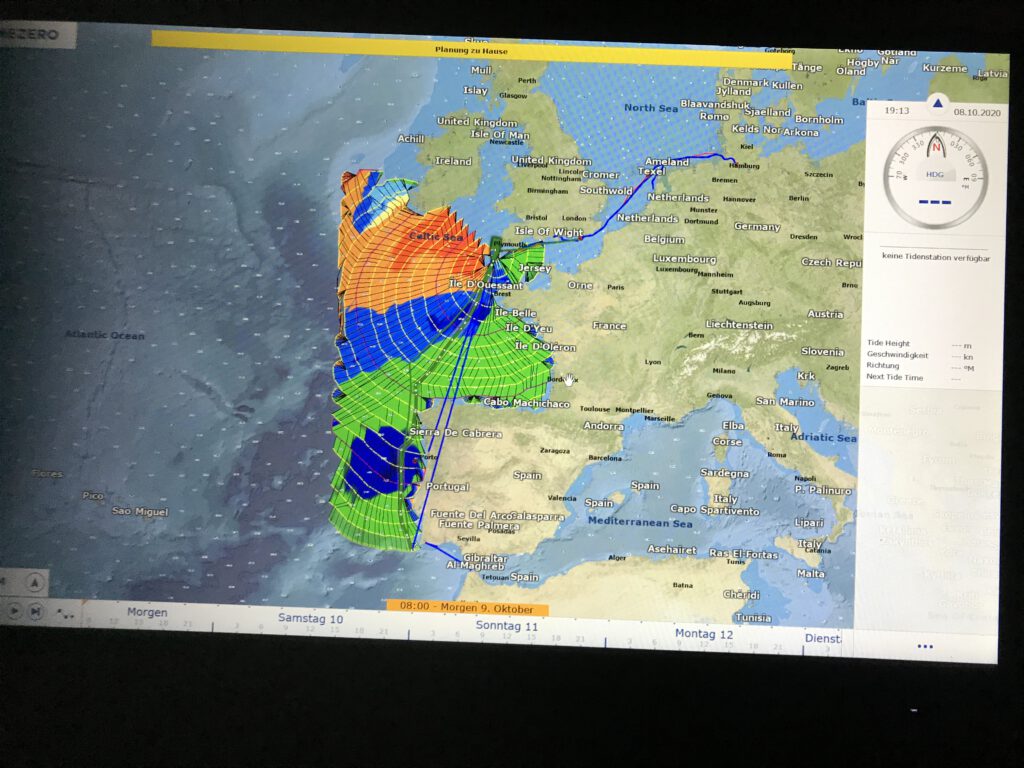
Time Zero PC-Software
Für uns ist das Time Zero Programm so hilfreich, weil es die Möglichkeit hat, den anderen Verkehr mit der Funktion „Closest Point of Approach“ (CPA) genau einzuschätzen und Kollisionsgefahren zu vermeiden. So bemerken wir auch die kleinsten Kursänderungen der Großschifffahrt auf unsere Annäherung nach Kontakt mit unserem aktiven Radarreflektor.
Radar Raymarine Quantum II
Als Ergänzung dient mir dann das Radar zum Erkennen von kleinen Fahrzeugen und Fischern ohne AIS sowie größerem Treibgut. Das digitale Raymarine Quantum II Radar mit Dopplerfunktion hat eine ausgezeichnete Auflösung und zeigt Fahrzeuge und Tonnen bis auf 10 m Distanz an. Das ist im dicken Nebel und nachts in engen Fahrwassern sehr hilfreich. Dabei unterscheidet der Plotter feste und bewegte Ziele (in Vorausfahrt und als Entgegenkommer). Auch kann man die CPA Funktion einsetzen, aber immer nur für einzelne markierte Ziele. Beide Systeme zusammen geben vor allem nachts ein sicheres Bild von der Umgebung.
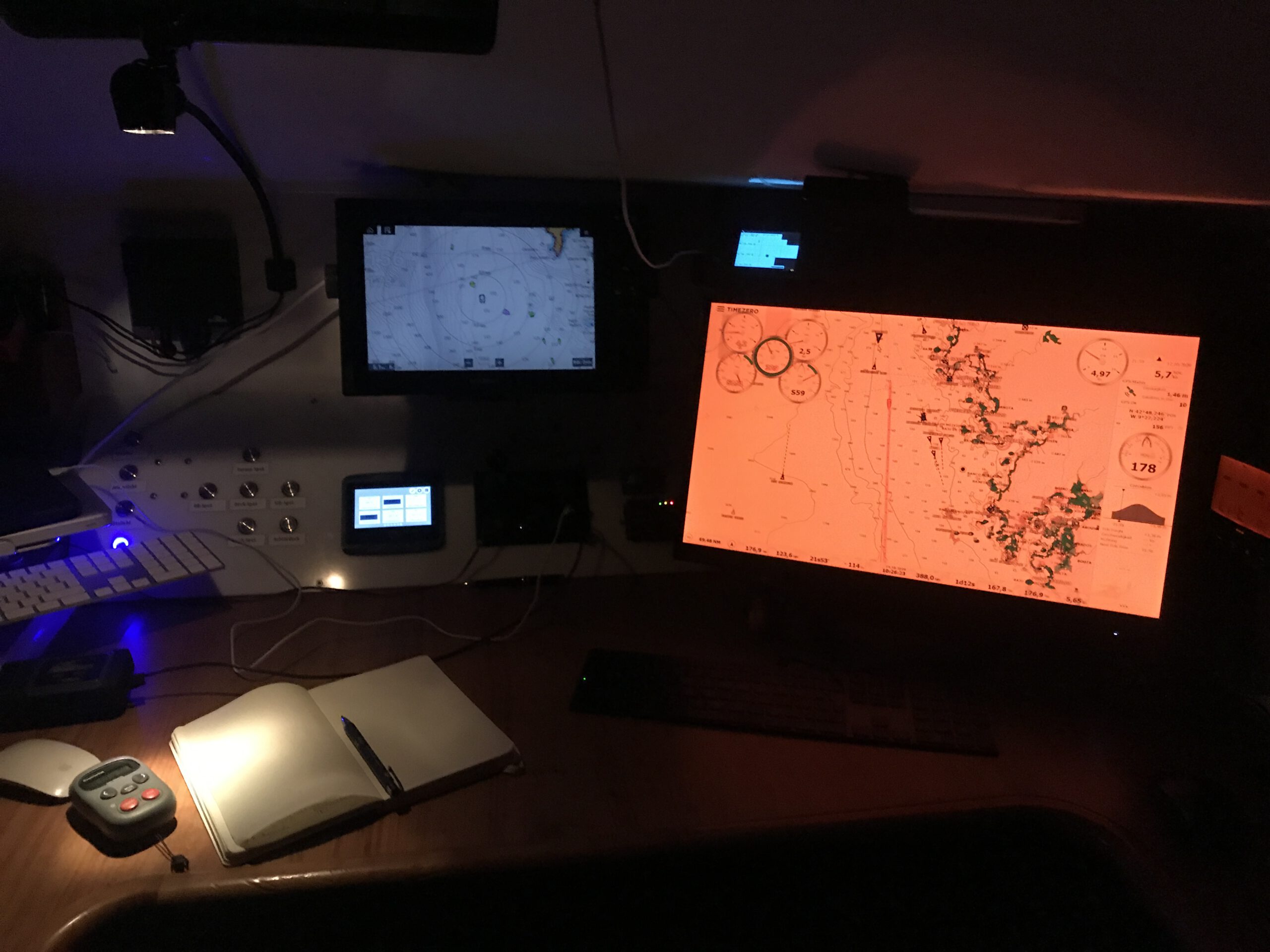
Zusammen mit dem Funk in Griffweite sitzt man bei uns auf dem Skipper-Stuhl sehr bequem und kann das Schiff so vor dem Wetter geschützt steuern. Nähern wir uns dem Ziel, wechseln wir nach draußen
auf die Fahrstände an BB oder Stb je nach Approach.
Grundsätzlich läuft unsere Navigation in 5 Schritten ab.
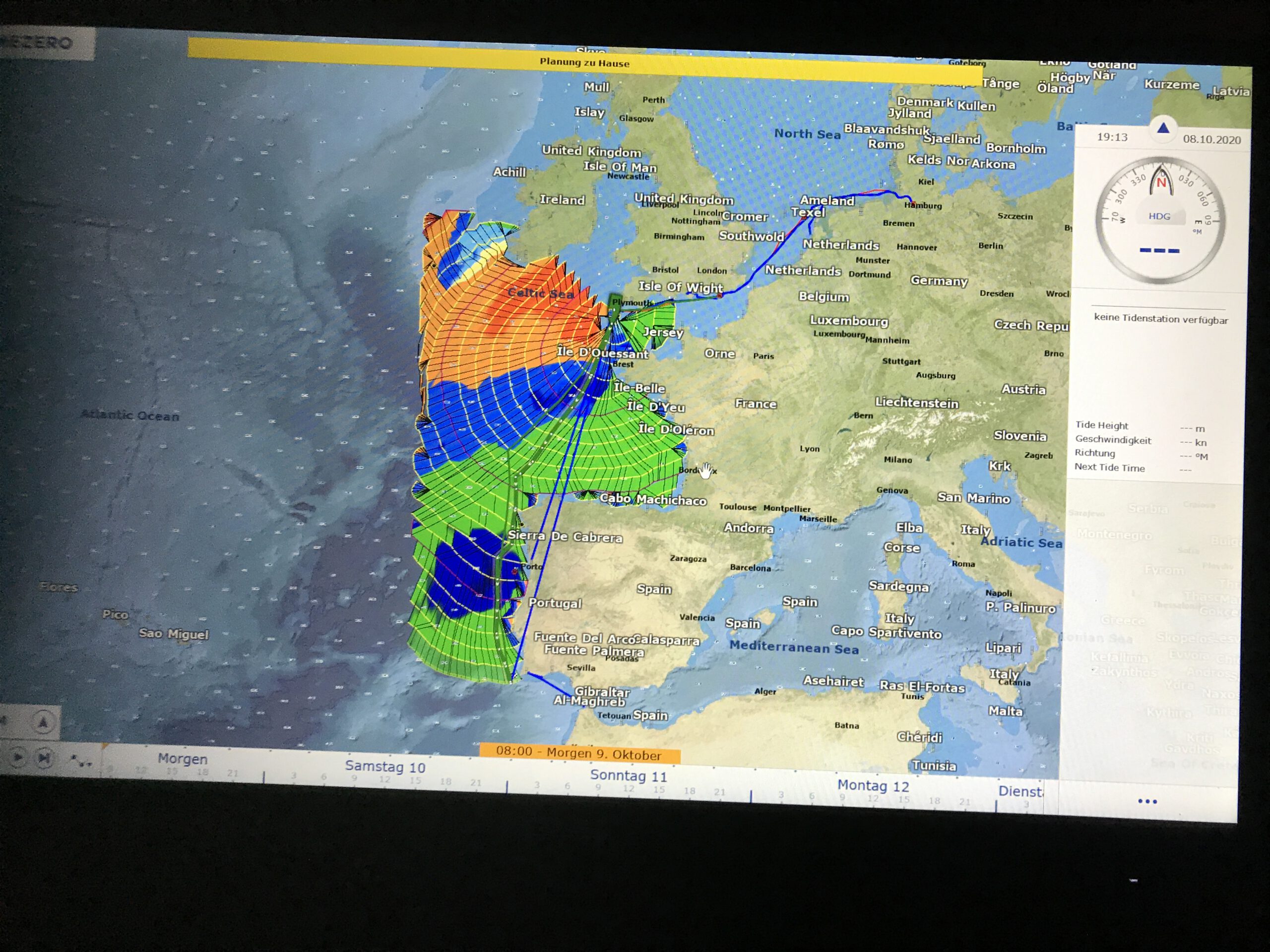
- Ziel festlegen: Richtung, Land und mögliche Hafenprioritäten, geplante Distanz und die nötige Reisezeit in Bandbreiten ermitteln. Autorouting und Überprüfung der besten Strecke nach navigatorischen Gesichtspunkten (Verkehr, Risikogebiete, Sperrzonen, Interessantes)
- Wetterrouting nach drei Systemen (Seaman Wetterwelt Kiel; MaxSea / Time Zero; Marinetraffic Prognose), 3 Tage die Tendenzen beobachten und dann den Startzeitpunkt ins Auge
fassen.
- Schiff und Crew vorbereiten, frisch verproviantieren, Systemcheck, Diesel und Wasser bunkern.
- Abfahrtzeit genau festlegen, ausklarieren und ablegen. Navigation entsprechend der Realität regelmäßig (mindestens immer beim Wachwechsel) überprüfen.