Good experiences with the iPad
When we navigated the ROTER SAND in 2012 in the St. Lawrence River towards Quebec, we used comparable equipment. In the St. Lawrence River, there are areas in the stream during low tide with 14 knots of current downstream and with rising tide there were 7 knots of current also downstream. So we should have been faster at anchor with our classic traditional ketch than under engine and/or sail!
The only way to get ahead at all was to use the tidal reverse currents between the rocks on the 5 m line. However, the pilot’s recommendation from big shipping was “Keep a minimum distance of two miles from the rocks!” – then he went to sleep. I sneeked next to the rocks under full sail and with with full throttle ahead thus we managed up to 80 nm a day. I had learned this technique decades ago while sailing in a small sailboat on the Rhine against the current and around the groynes.
To execute this canoeing tactic safely, you need very accurate charts and the exact position. My little iPad 2 was the most accurate. On it, the 5-m line was clearly visible and the position corresponded exactly to the gurgling and gurgling you could hear outside. Since this experience, I always have the iPad and the matching Navionics app with me.
The device also runs the map software from NV Charts. It goes well with the paper maps we have on board from NV, and it comes free with the purchase of the paper maps. However, the scanned maps are clearly inferior to Time Zero’s vector maps in daily use.
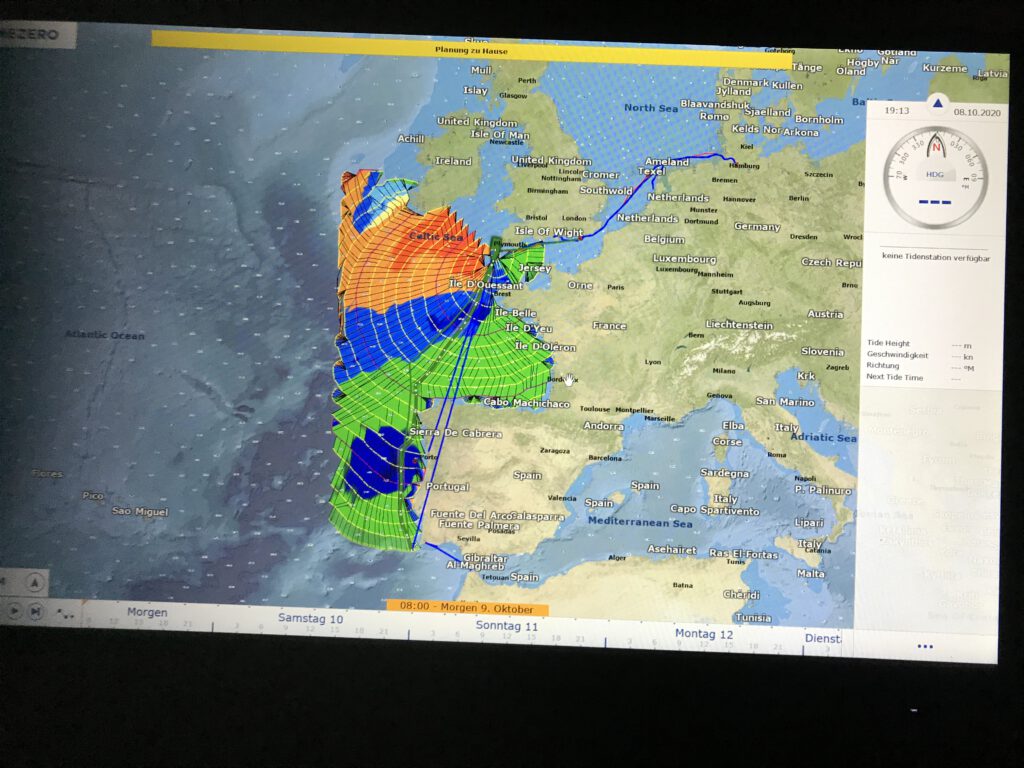
Time Zero PC software
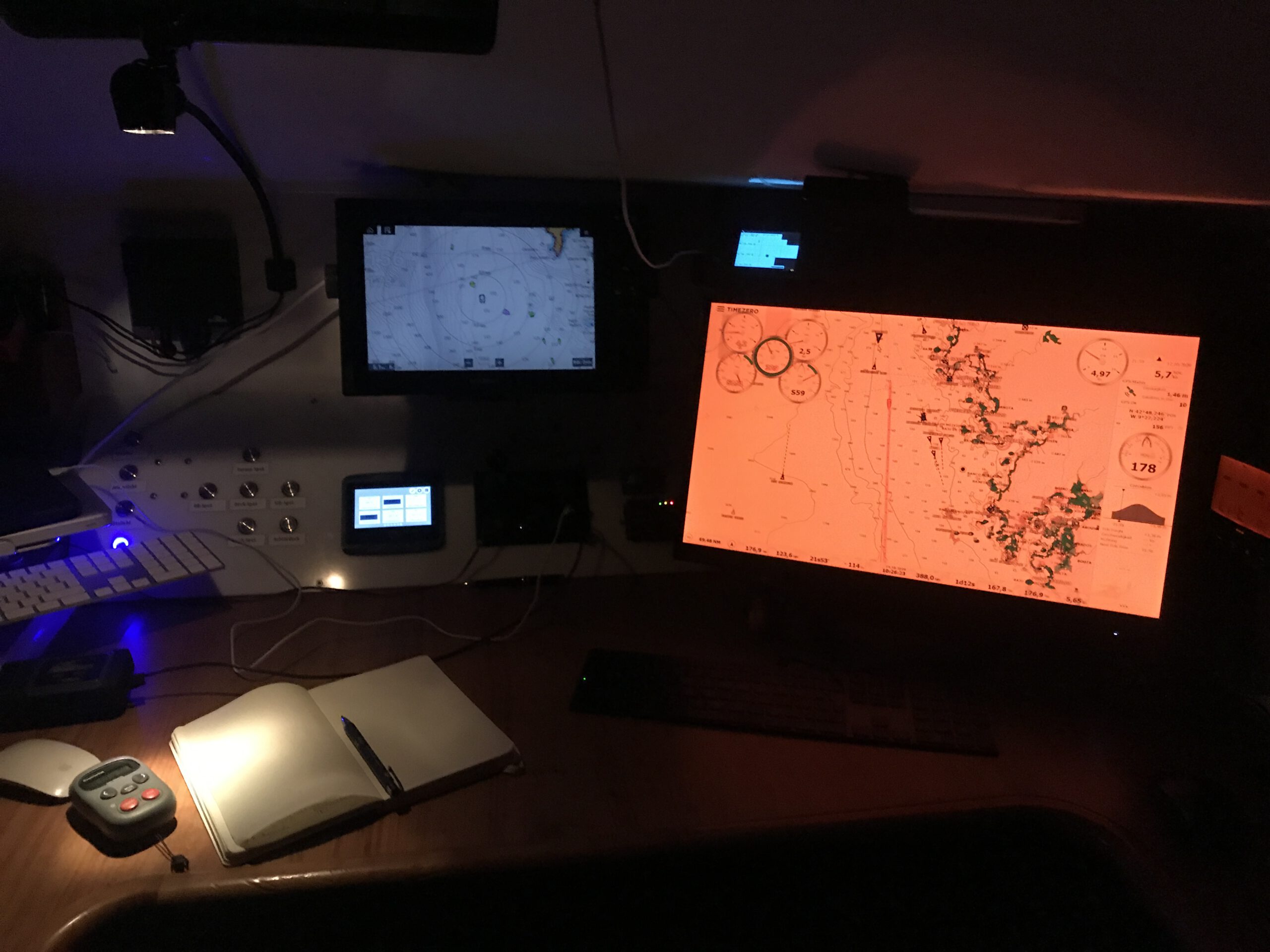
For us, the Time Zero software is so helpful because it has the ability to accurately assess other traffic with the Closest Point of Approach (CPA) feature and avoid collision hazards. In this way, we notice even the smallest course changes of large vessels on our approach after contact with our active radar reflector.
Radar Raymarine Quantum II
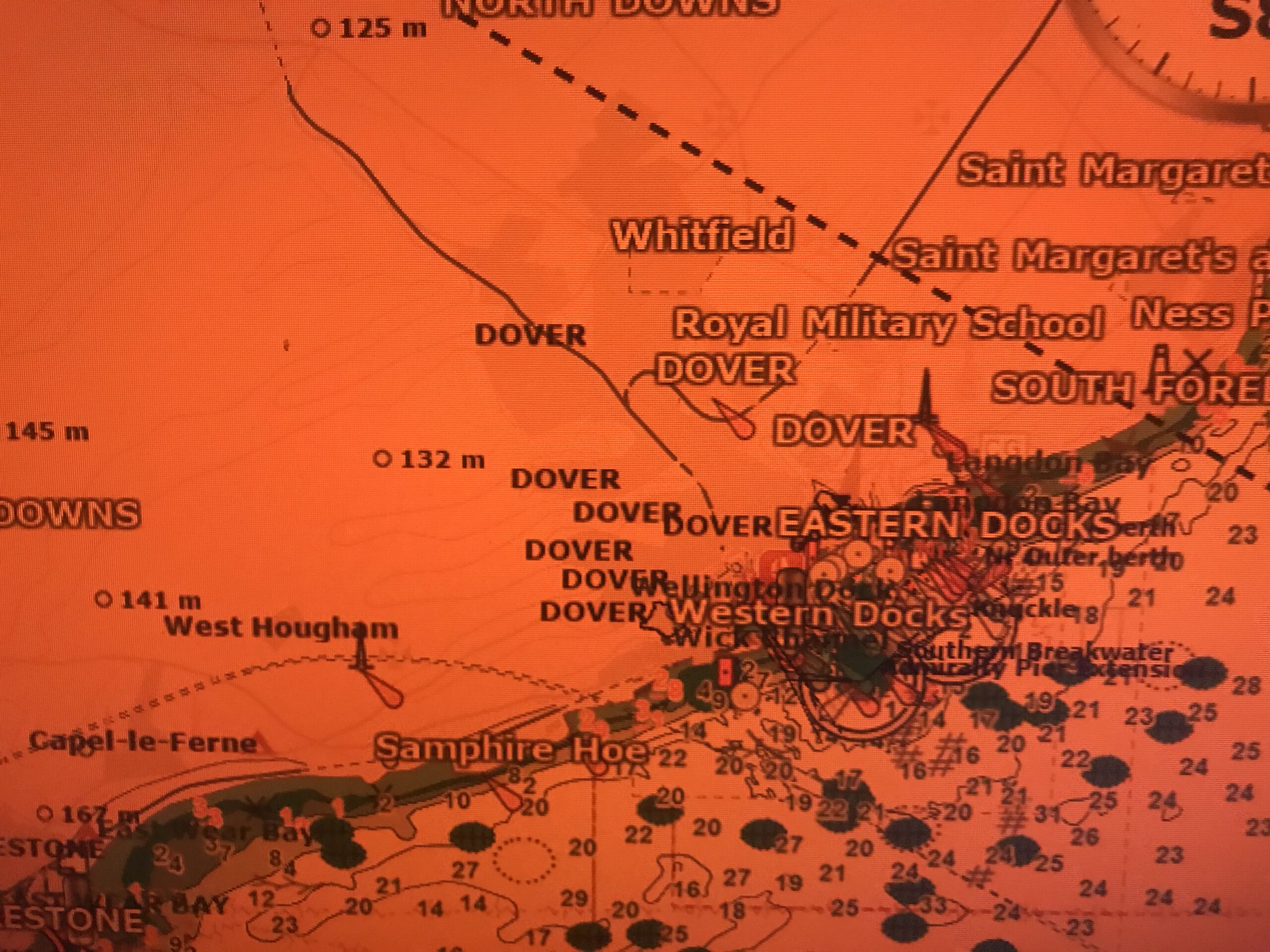
As a supplement, I then use the radar to detect small craft and fishermen without AIS, as well as larger flotsam. The digital Raymarine Quantum II radar with Doppler function has an excellent resolution and shows vehicles and buoys up to a distance of 10 metres. This is very helpful in thick fog and at night in narrow fairways. The plotter differentiates between fixed and moving targets (in advance and as an opposite commer). You can also use the CPA function, but only for individual marked targets. Both systems together give a reliable picture of the surroundings, especially at night.
Together with the radio within reach, we sit very comfortably in the skipper’s chair and can steer the boat protected from the weather. When we are approaching our destination, we switch to the outside
to the helm stations at BB or Stb depending on the approach.
Basically, our navigation is done in 5 steps.
- Determine destination: direction, land and possible port priorities, planned distance and the necessary travel time in bandwidths.
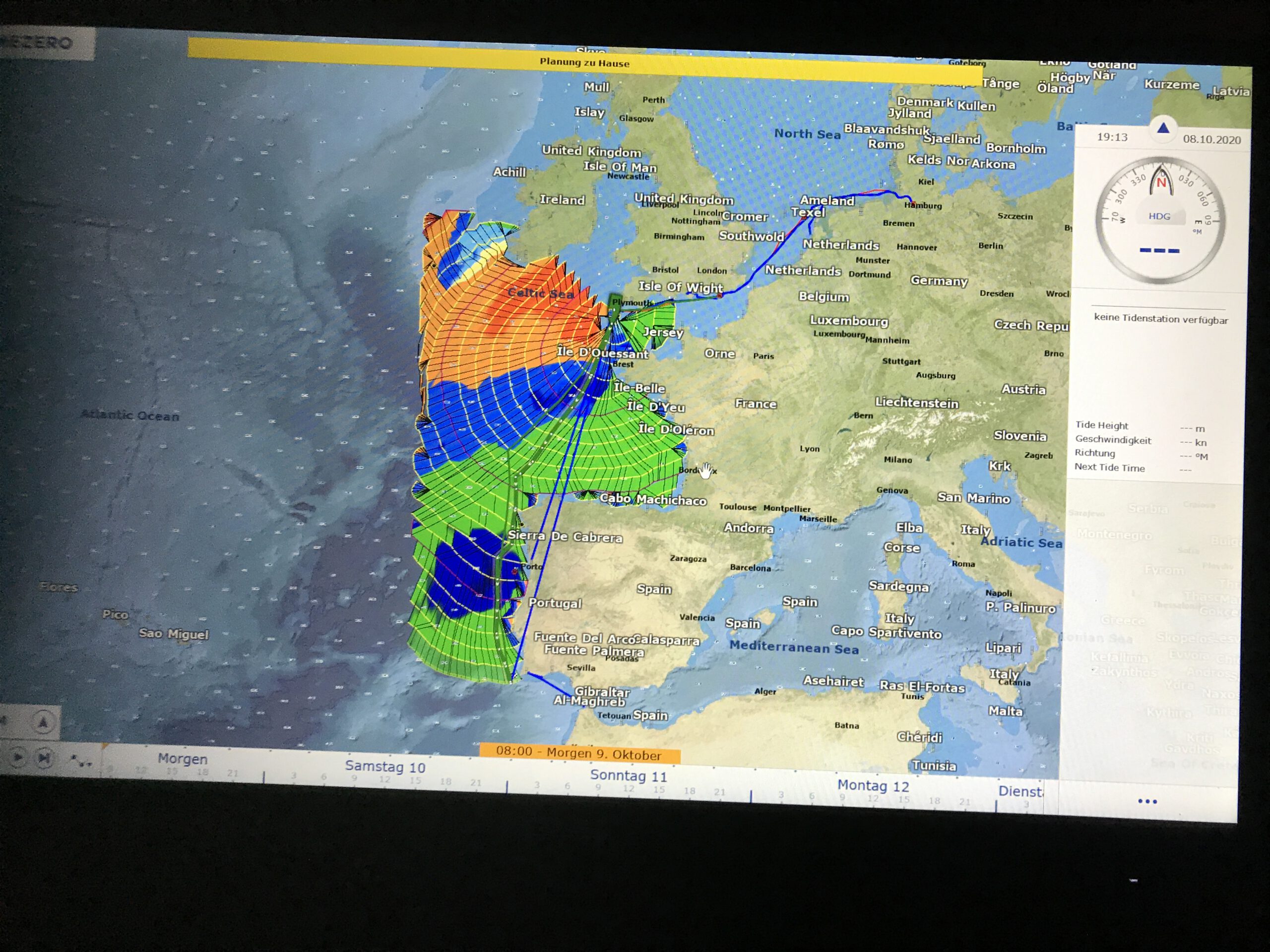
- Autorouting and checking the best route according to navigational aspects (traffic, risk areas, restricted zones, interesting things).
- Weather routing according to three systems (Seaman Wetterwelt Kiel; MaxSea / Time Zero; Marinetraffic forecast), observe the trends for 3 days and then consider the starting time.
- Prepare ship and crew, stock up on fresh provisions, system check, bunker diesel and water.
- Set a precise departure time, clear out and cast off. Check navigation regularly according to reality (at least always at the change of watch).